Head: Postdoc David Liović
Area of work of the laboratory:
The Laboratory for Machine Elements and Structures deals with design-related problems in mechatronic and robotic systems.
Most of the algorithms we develop can be found in our repositories.
Laboratory Equipment:
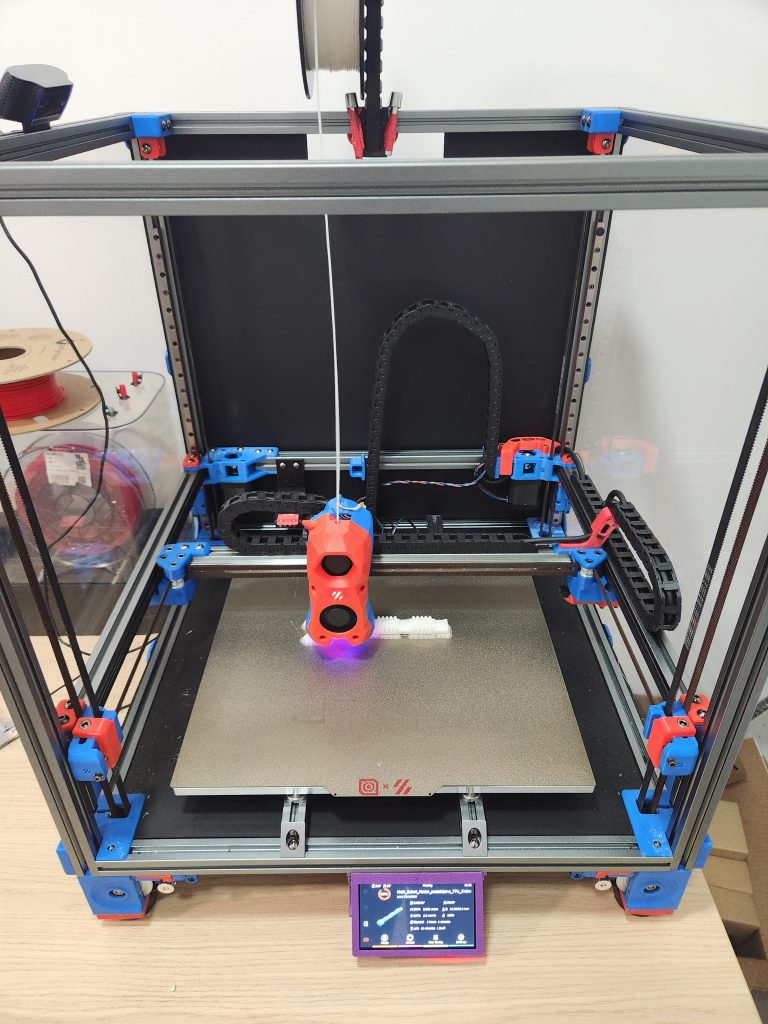
Voron V3 3D Printer
Compared to standard 3D printers, this printer—assembled in the laboratory to meet the needs of our scientific research and teaching—also enables bricked-layer printing. This is particularly important for ensuring impermeability when producing parts that must be watertight or airtight, such as channels, containers, or pneumatic components.
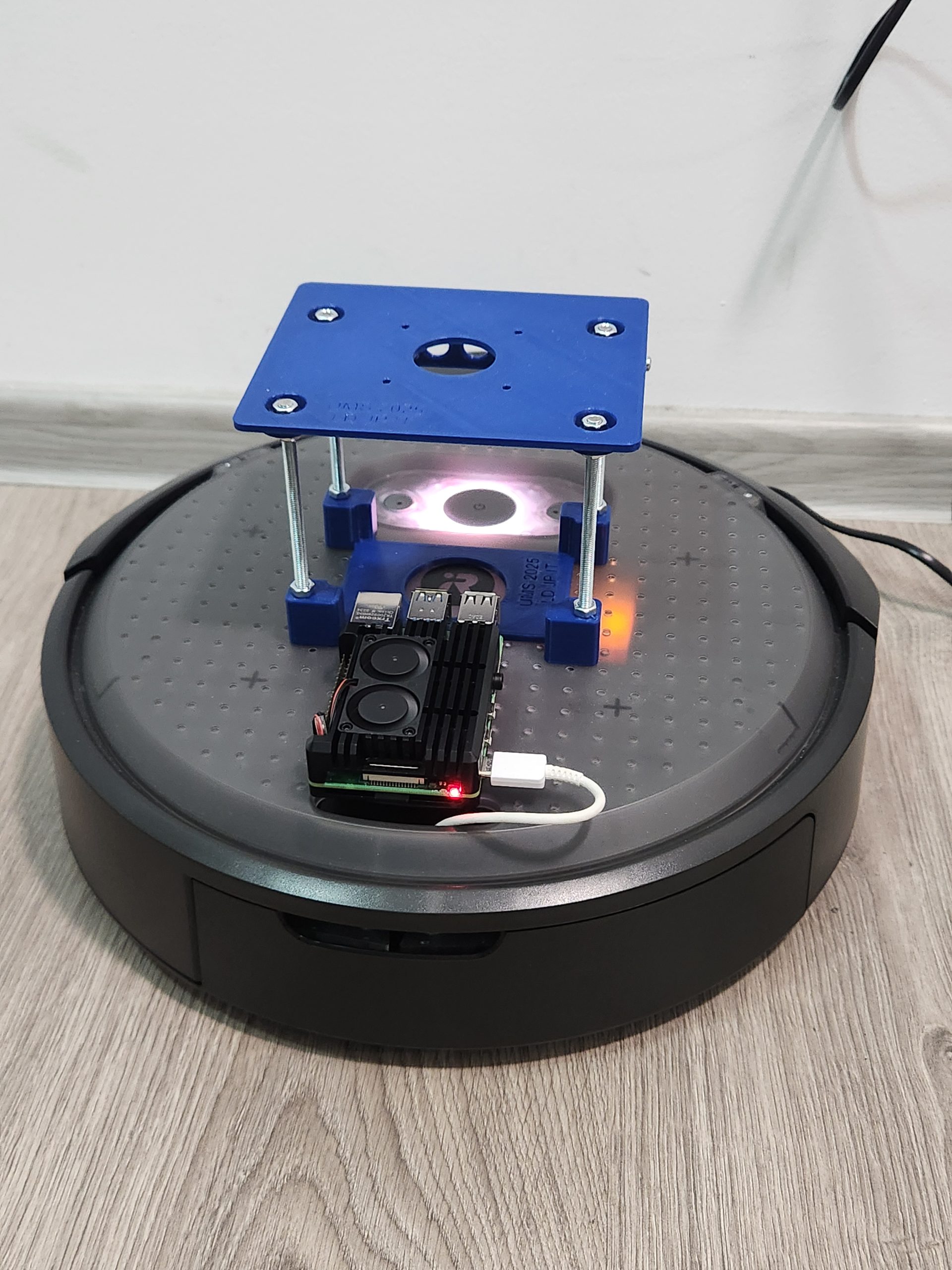
Robot Create 3 Educational robot
A mobile robotic platform on which our students learn the fundamentals of robotics in practice: programming and working with sensors, motion control (odometry, velocity control), localization and mapping, and path planning and autonomous navigation (using additional equipment including a LiDAR and a depth camera). Through projects, students develop and test algorithms in real-world environments, typically using ROS 2 and working in teams. Example of a student project result in the course Control of Mechatronic Systems: Youtube Video
ReactorX-200 Educational Robot Manipulator
An educational robotic arm (manipulator) that we use to learn and solve object-manipulation tasks. Students learn kinematics and joint control, trajectory planning, gripper control, and the integration of sensors and cameras for pick-and-place, sorting, and simple assembly tasks. The platform is well-suited for laboratory work because it enables quick integration with a computer and common robotics tools (e.g., ROS 2/MoveIt), and it supports projects from basic to more advanced levels (for example, the robotic arm is intended to be mounted on the Create 3 mobile robot). Example of a student project result in the course Control of Mechatronic Systems: Youtube Video

RPLIDAR A2M12
A 2D LiDAR sensor with 360° scanning that enables distance measurement and obstacle detection in a plane. We use it for environmental mapping (SLAM), localization, and autonomous navigation of mobile robots.

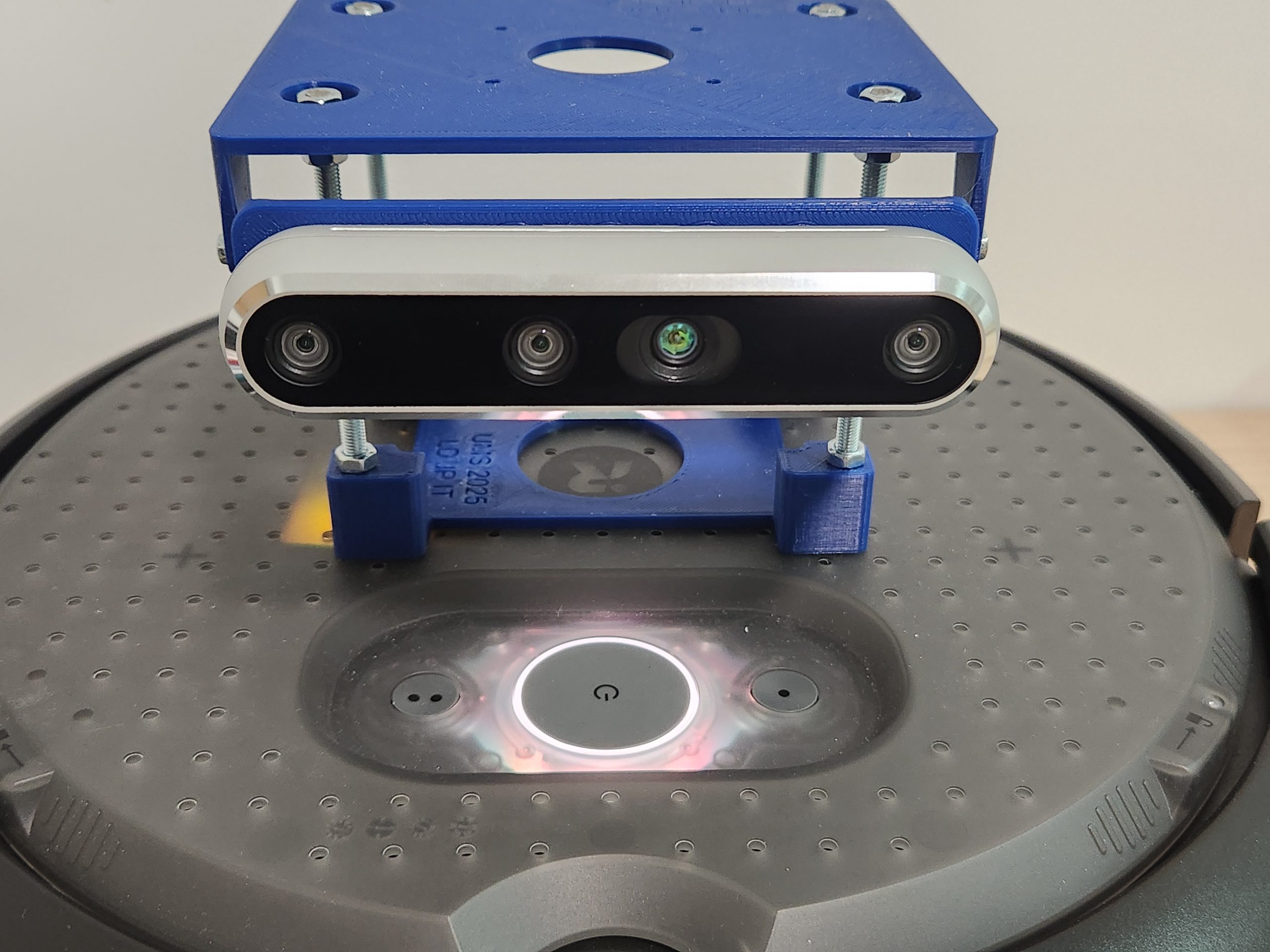
Intel RealSense D455 je RGB-D camera
This camera combines RGB imaging and depth measurement for 3D perception of the environment. It enables obstacle detection, object recognition, and 3D mapping, and we use it in robotics for visual localization, SLAM, and navigation.