Voditelj: v. asist. dr. sc. David Liović
Područje rada laboratorija:
Laboratorij za strojne elemente i konstrukcije bavi se konstrukcijskim problemima u mehatroničkim i robotskim sustavima.
Većina algoritama koje razvijamo mogu se pronaći u našim repozitorijima.
Oprema laboratorija:
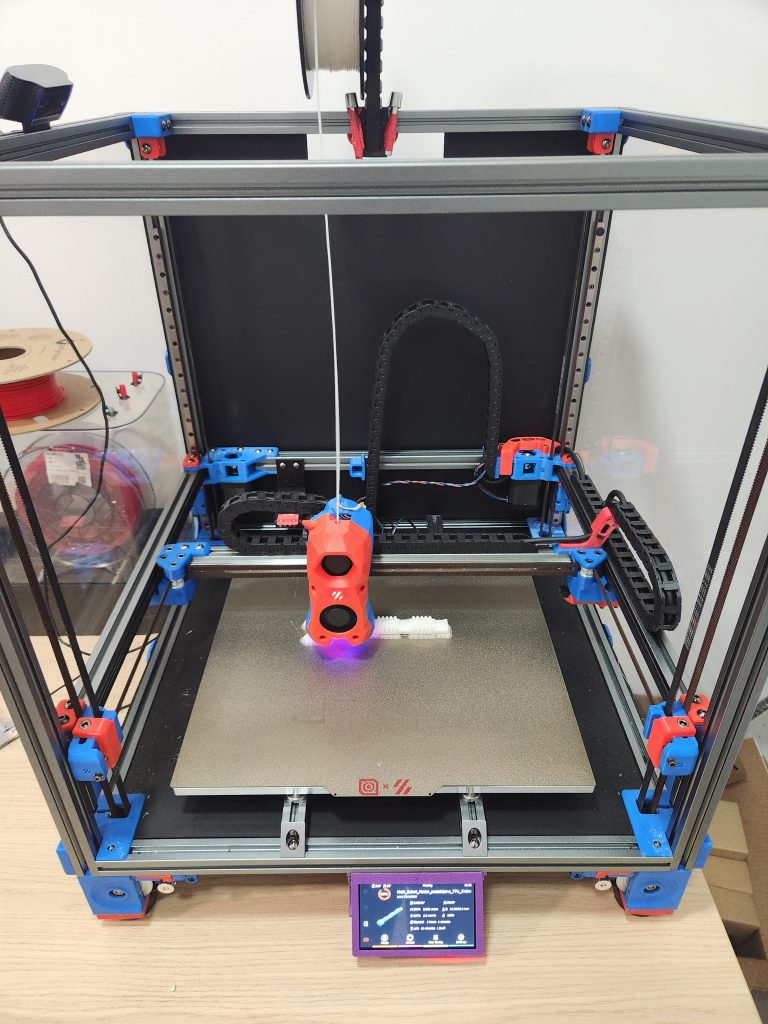
Voron V3 3D pisač
U odnosu na standardne 3D printere, ovaj printer, sastavljen u laboratoriju zbog potreba našeg znanstveno-istraživačkog rada i nastave, omogućava i tzv. bricked layer ispis, što nam je posebno važno za osiguravanje nepropusnosti pri izradi dijelova koji moraju biti vodonepropusni ili nepropusni za zrak, npr. kanala, spremnika ili pneumatskih komponenti.
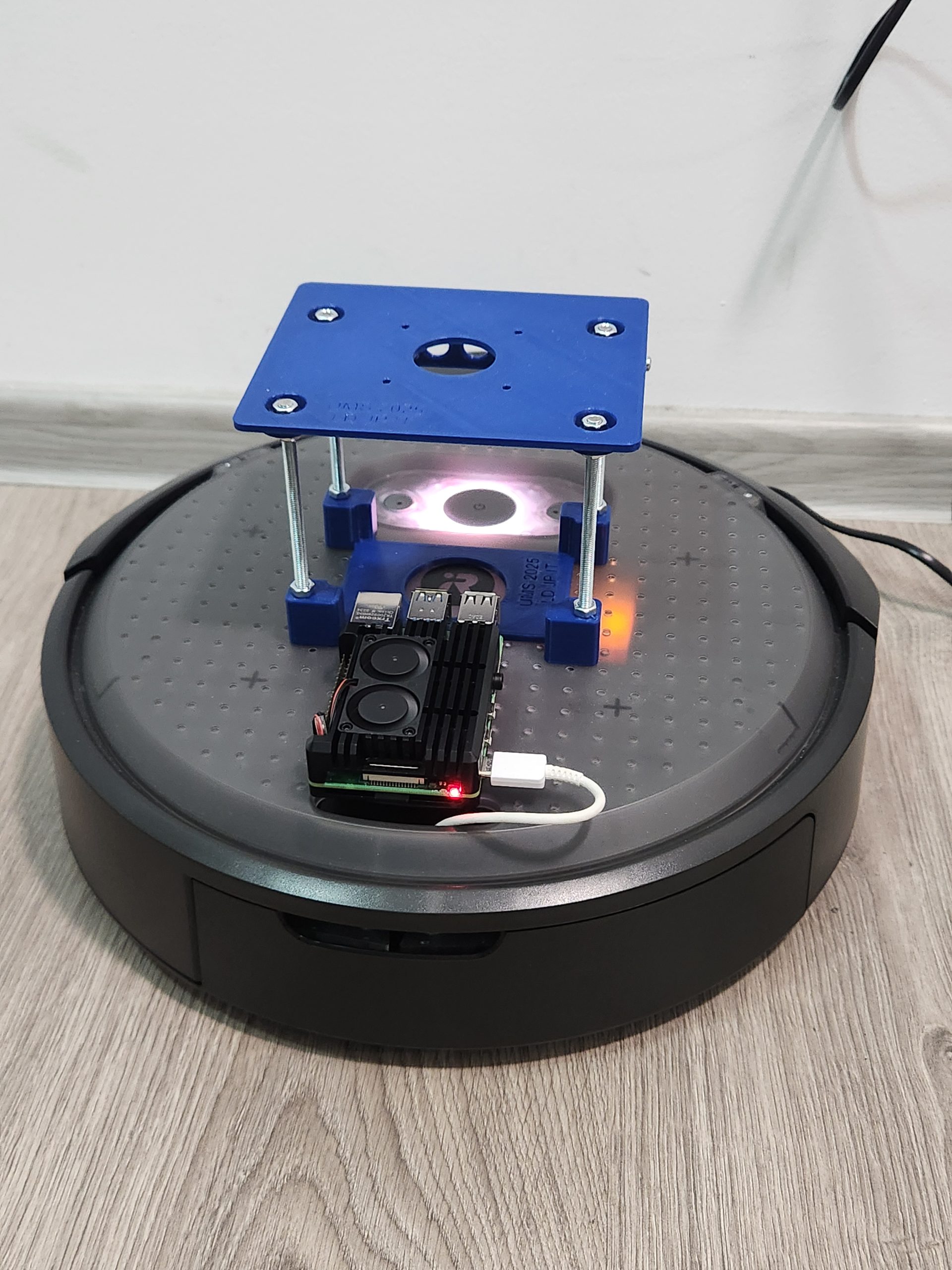
Edukacijski Robot Create 3
Mobilna robotska platforma na kojoj naši studenti uče osnove robotike u praksi: programiranje i rad sa senzorima, upravljanje kretanjem (odometrija, kontrola brzine), lokalizaciju i mapiranje te planiranje putanje i autonomnu navigaciju (koristeći dodatnu opremu koja uključuje LIDAR i dubinsku kameru). Kroz projekte studenti razvijaju i testiraju algoritme u stvarnom okruženju, tipično uz ROS 2 i rad u timovima. Primjer uspješnog projekta studenata na kolegiju Upravljanje mehatroničkim sustavima: Youtube Video
Edukacijska robotska ruka ReactorX-200
Edukacijska robotska ruka (manipulator) koju koristimo za učenje i rješavanje zadataka manipulacije s objektima. Studenti na njoj uče kinematiku i upravljanje zglobovima, planiranje putanje, upravljanje hvataljkom te integraciju senzora i kamera za “pick-and-place”, sortiranje i jednostavne montažne zadatke. Platforma je pogodna za rad u laboratoriju jer omogućuje brzu integraciju s računalom i tipičnim robotskim alatima (npr. ROS 2/MoveIt) te izvođenje projekata od osnovnih do naprednijih (primjerice, robotska ruka je predviđena za montaču na mobilni robot Create 3). Primjer uspješnog rezultata na projektu u sklopu kolegija Upravljanje mehatroničkim sustavima: Youtube Video

RPLIDAR A2M12
2D LiDAR senzor s 360° skeniranjem koji nam omogućuje mjerenje udaljenosti i detekciju prepreka u ravnini. Koristimo ga za mapiranje okoline (SLAM), lokalizaciju i autonomnu navigaciju mobilnih robota.

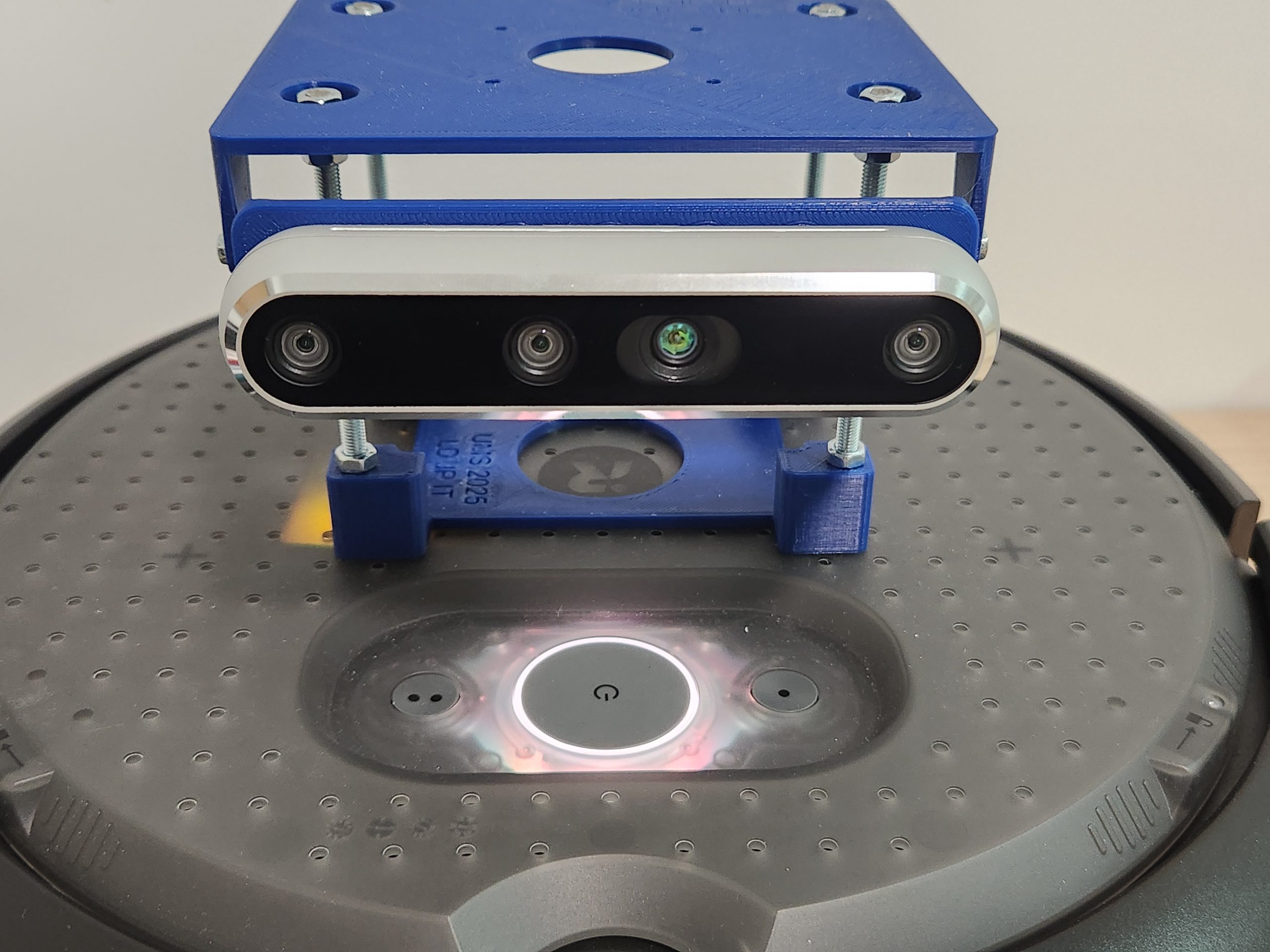
Intel RealSense D455 je RGB-D kamera
Ova kamera kombinira RGB i dubinsko mjerenje za 3D percepciju okoline. Omogućuje detekciju prepreka, prepoznavanje objekata i 3D mapiranje, a mi ju koristimo u robotici za vizualnu lokalizaciju, SLAM i navigaciju.